
制御システム
制御理論、最適化理論、スマートグリッド、パワーアシストロボット
複雑な動的システムを高度に制御,最先端システム制御理論の開発
電力ネットワークの高効率分散制御
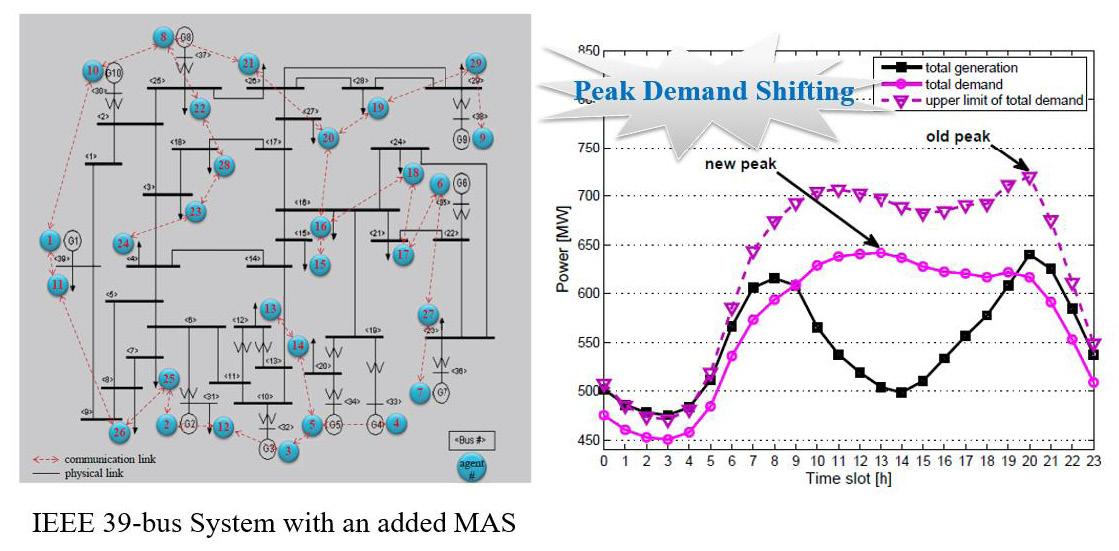
マルチエージェントシステムの合意制御理論を用いて分散型ADMM(Alternative Direction Multiplier Method)アルゴリズムを開発し,スマートメーターなどIoT技術を活用する電力ネットワーク制御へ応用して以下の(1)~(3)について高効率な分散制御を実現する研究を行っています.
(1)リアルタイムプライシングとデマンドレスポンス
社会厚生関数(Social Welfare Function)を導入し,分散型ADMMを応用して,常にエネルギーバランスを満たしつつ,極めて早い収束速度で大域的な最適解が得られることを示しました.
(2)熱電併給(CHP:Combined Heat and Power)システムの協調制御
新たに効率マッチングの考え方を導入し,燃料電池の非線形な発電効率に対応できる新たな分散型ADMMアルゴリズムを開発しました.
(3)V2G(Vehicle to Grid)バーチャルパワープラントとマイクログリッドの統合制御
EVの蓄電池をバーチャルパワープラントとして活用することでマイクログリッドの最適なオペレーションを実現するアルゴリズムを開発し,実証実験による実用化を目指しています.
リアルタイムプライシングとデマンドレスポンス
IoT通信ネットワークにおける不確かさ(時間遅れ,飽和)を考慮したロバスト制御
IoT通信ネットワークを活用して電力ネットワーク,無線センサネットワーク,交通網の制御を行う際,局所的なエージェント間の協調行動によって,大域的な目標を達成できるか否かを検証するコンセンサス制御問題が重要となります.本研究では,IoT通信ネットワークにおいて時間遅れや飽和などの不確かさが存在する制約付きコンセンサス問題を,グラフ構造のエッジダイナミクスを用いて冗長性のない低次元なマルチエージェントシステムへと変換し,従来は出来なかった大域的に指数オーダーの収束性を達成するロバストなコンセンサス制御を実現しています.
また,受動性を考慮して大域的な目的関数と局所的な仕様を同時に最適化する制御を実現するグローカル制御を開発してドローン(マルチローター)や電気自動車(マルチモーター)のシステムに応用し,複数のローターやモーターから構成されるシステムにおいて,障害に対応できるレジリエントな制御を実現することを目指しています.
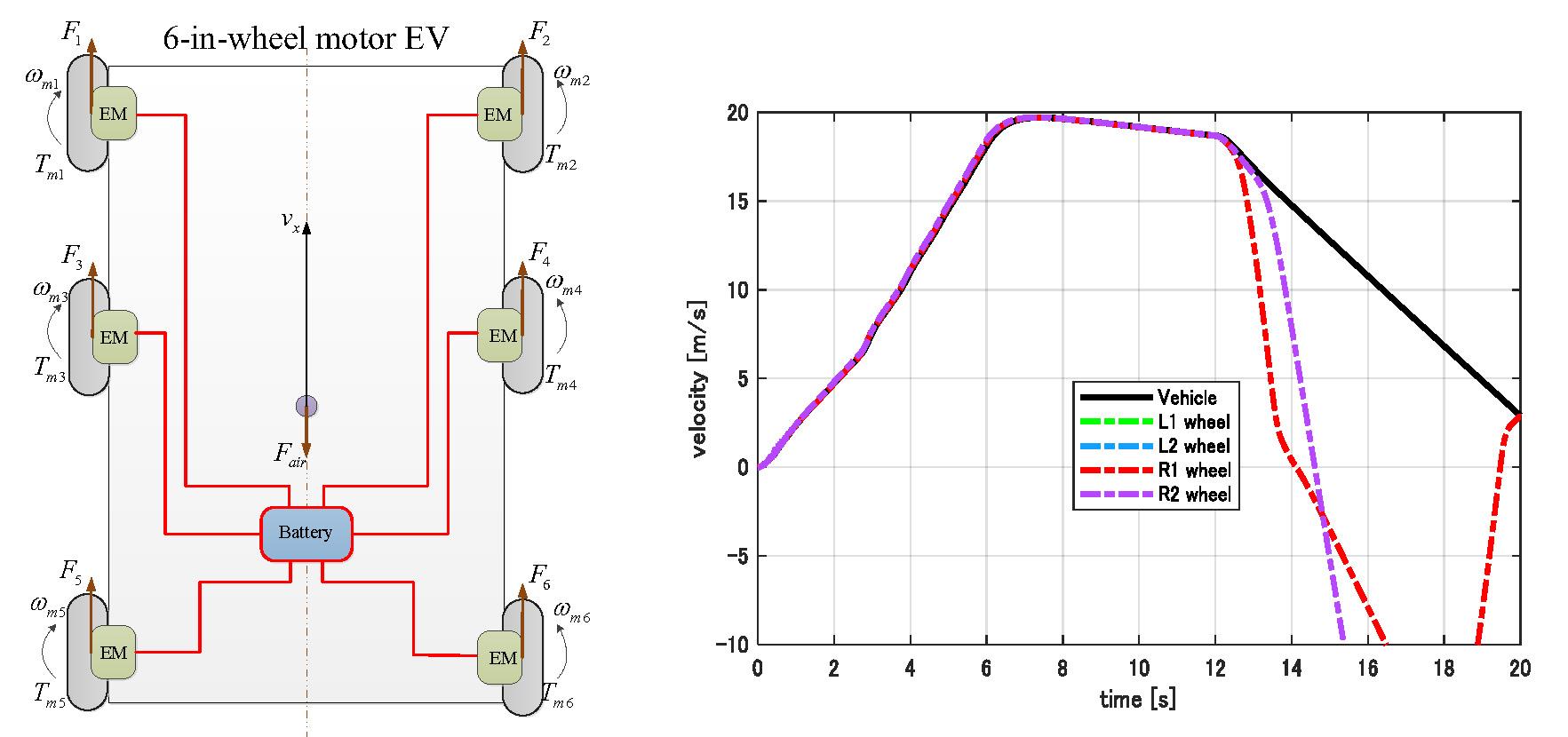
電気自動車(マルチモーター)のスリップ率グローカル制御
パワーアシストシステムのロバスト制御
歩行アシスト装置を使用するリハビリテーションの効率を上げるために,人の発揮力と動作意図を推定して,必要最小限の力をアシストするAAN(Assist as Needed)制御の手法を提案しています.シャローなニューラルネットワークを繰り返しアルゴリズムにより学習することで未知パラメータを動的に推定し,また射影関数を用いて構成するリアプノフ関数により制御システムの大域的な安定性を維持する制御理論を導出し,実機実験によりAAN制御の有効性を証明しています.
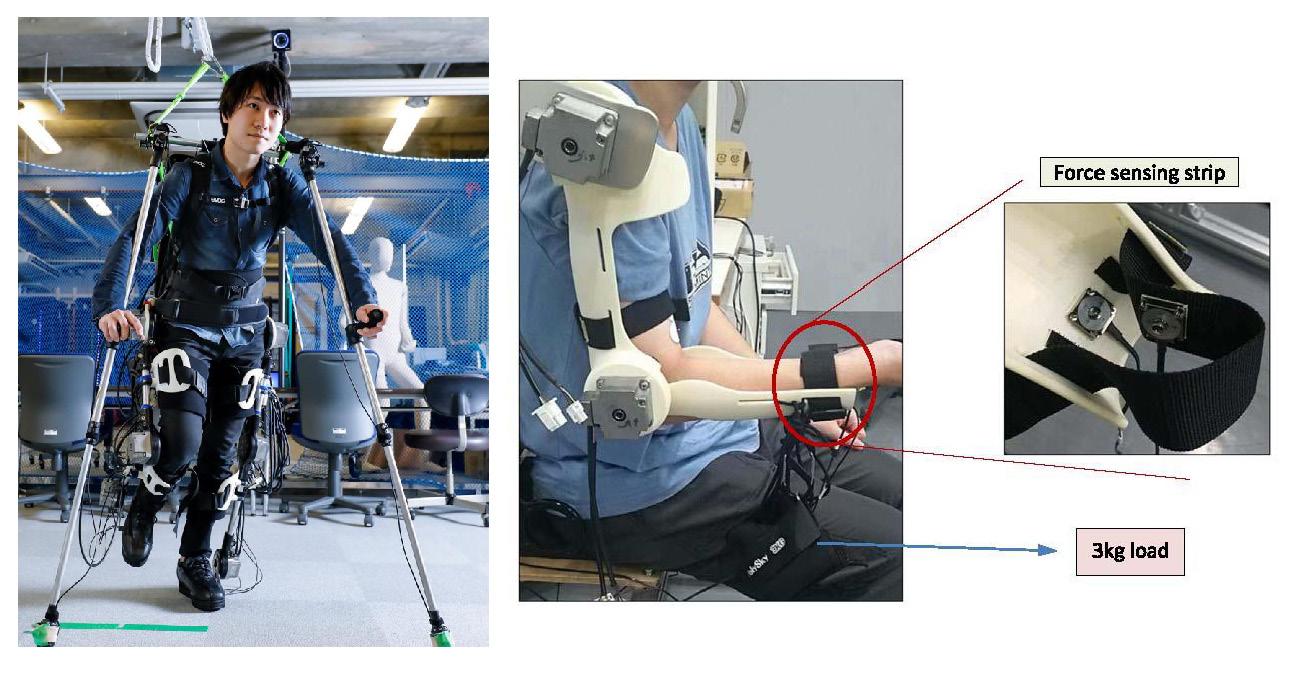
パワーアシスト装置のAssist-as-Needed制御
スマートセンター活動報告
- 2022年度スマート情報技術センターシンポジウム概要
- 2022年度シンポジウムでの活動報告「マルチエージェント制御理論と 大規模最適化によるロバスト制御」
- 2022年度スマートエネルギー技術研究センターシンポジウム概要
- 2022年度シンポジウムでの活動報告「マルチエージェント制御理論による エネルギーの分散協調制御」