豊田工業大学 研究センタースマートビークル研究センター

2010年設立 センター長:下田昌利
設計工学研究室
准教授 小林 正和
研究テーマ
- 力覚提示装置を用いたUAVの遠隔操作技術
- 座屈を考慮した薄板構造物の構造最適化
- 深層学習を用いた組立作業者の動作認識・評価
- コンプライアントメカニズムに基づく自動車サスペンション
主な研究内容
①力覚提示装置を用いたUAVの遠隔操作技術
マルチコプター型UAV(Unmanned Aerial Vehicle)はホバリング能力と無指向性の飛行能力による高い運動能力を持ち、幅広い活躍が期待されている。災害現場の捜索救難活動のように、人による確認、判断が必要とされる活動では操縦者がUAVを遠隔操作する必要があるが、障害物の多い環境におけるUAVの遠隔操作は難しい。
本研究では、図1に示す力覚提示装置Phantom Omni(以降Phantomと呼称)を用いたUAVの操作システムを構築した。提案システムの概要を図2に示す。提案システムでは、操縦者はPhantomを用いてUAVの操作指示を行うが、同時に障害物までの距離に基づいた操作反力を障害物とは逆向きにPhantomから受ける。操作反力を障害物に近づくほど大きくなるように設定することで、UAVを障害物に近づける方向に移動させにくくなるため、操縦者はUAVと障害物の距離関係を視覚以外の情報で認識できるようになり、障害物の多い環境においてUAVを安全に飛行させることができる。

図1:力覚提示装置
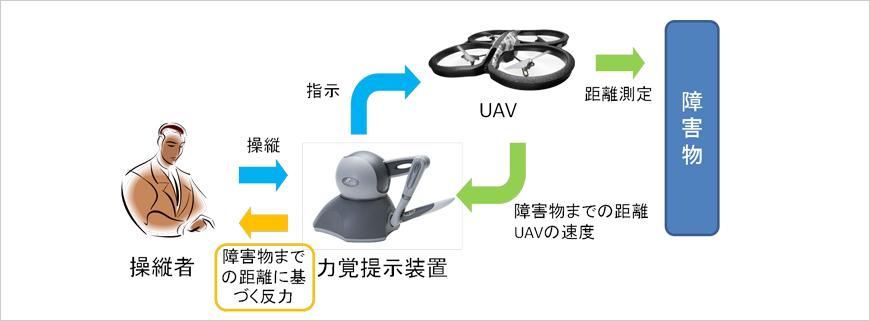
図2:提案システムの概略
②座屈を考慮した薄板構造物の構造最適化
薄板構造は自動車や航空機、宇宙ロケットなど多くの機械製品で用いられている。薄板構造は座屈が生じやすいため、高強度化と軽量化の両立のためには、座屈を考慮した構造最適化が求められる。構造最適化では計算の進行とともに構造物の形状が変化し、それに伴い座屈の形態が変化するため、効率的な計算のためには座屈の形態を適切に認識することが求められる。
本研究では、構造物の形状変化に伴う座屈形態の変化を認識するために、深層学習を用いて画像的に座屈の形態を認識する方法を提案する。図3には提案手法で構築したCNNの構成を示し、図4に判定例を示す。
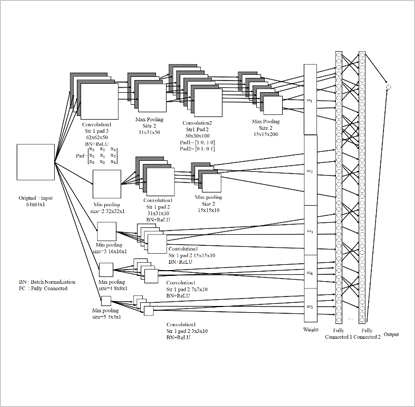
図3:座屈形態認識のためのCNN
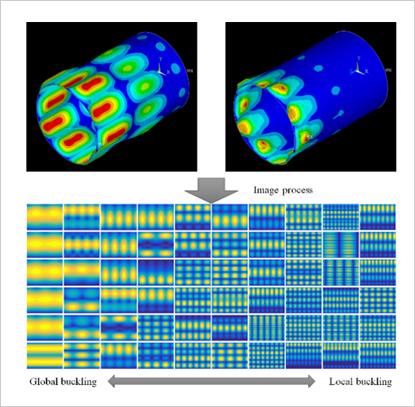
図4:座屈形態の認識